Prakrut Kotecha
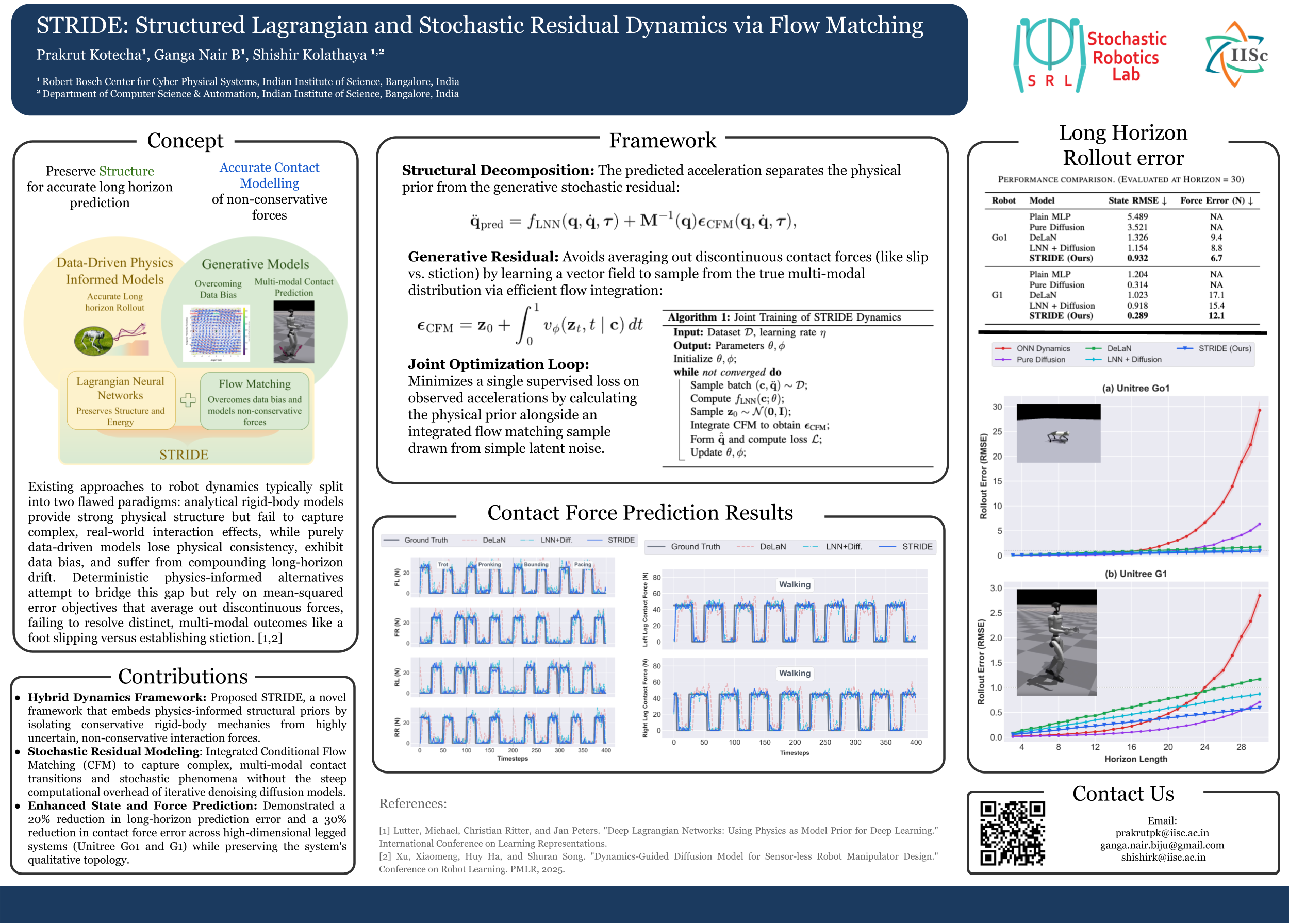
I am a Ph.D. researcher in Cyber-Physical Systems at the Indian Institute of Science (IISc), Bangalore, working under the guidance of Prof. Shishir NY. My research focuses on developing learning-based dynamics models and optimal control algorithms for robots, with the goal of enabling robust and adaptive robotic locomotion.
My interest in robotics began during my undergraduate studies at VNIT Nagpur, where I was an active member of IvLabs under the mentorship of Prof. Shital Chiddarwar. Since then, I have been deeply engaged in advancing intelligent and physically grounded control strategies for complex robotic systems.
My research interests include:
- Quadrupedal Locomotion & Dynamics
- Learning-based Control Systems
- Model Predictive Control (MPC)
- Reinforcement Learning for Robotics
- Reconfigurable Robotic Systems
I am always open to research collaborations and discussions related to robotics, learning-based control, and dynamic systems.
Publications & Patents

Workshop and Late Breaking Results
Projects
Individual project pages are being updated with more details soon.
Experience
Talks & Presentations